![]()
Full size open platform humanoid
To support and collaborate with mankind,
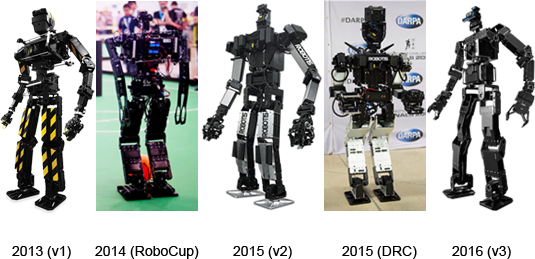
ROBOTIS has been developing THORMANG: Open platform humanoid

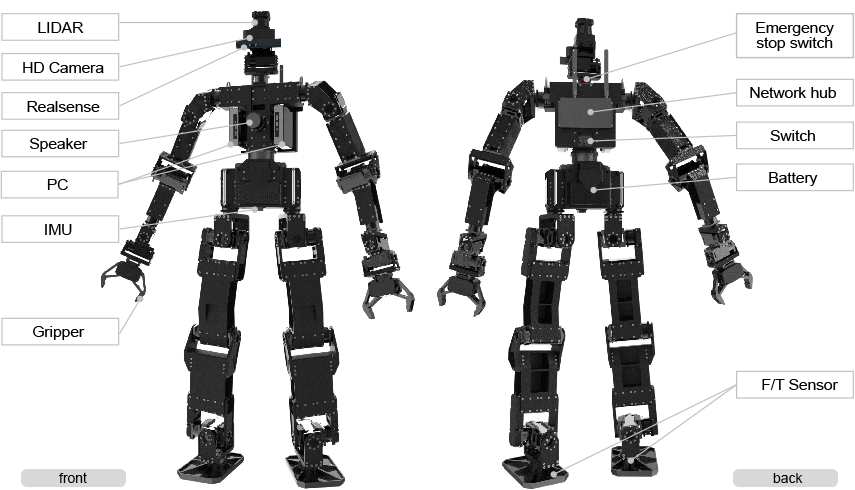
Basic Feature
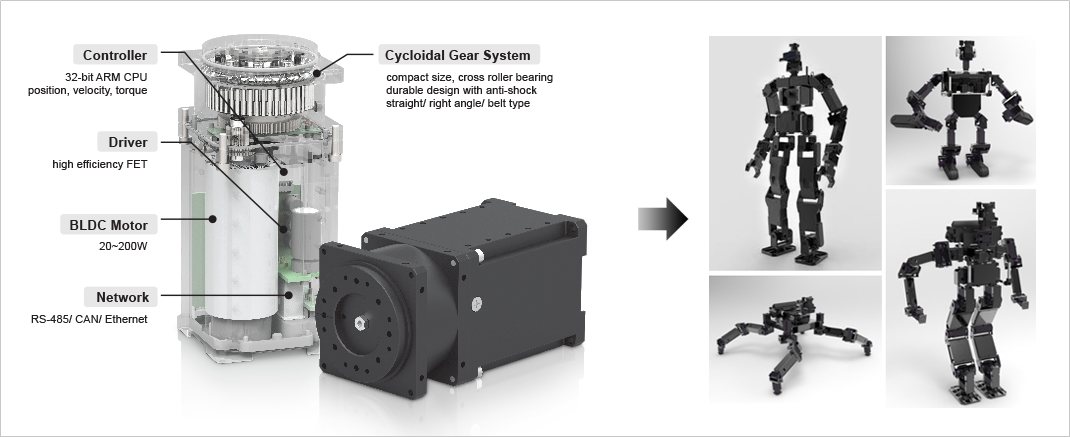
H/W Architecture
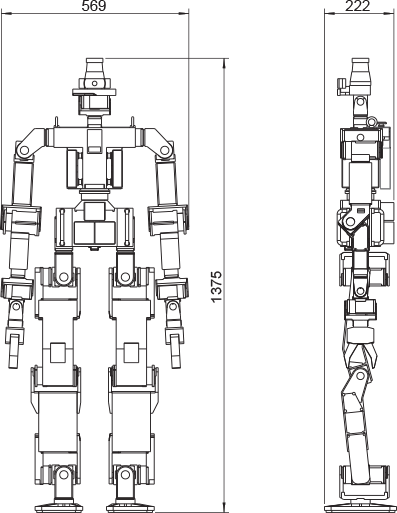
Specification
| THORMANG3 | |
| Weight | 42kg |
| Height | 137.5cm |
| Controller (PC) |
Intel® NUC with Intel® Core™ i5 Processor |
| Sensor | Logitech C920 HD Camera x 1 Intel Realsense x 1 Hokuyo UTM-30LX-EW x 1 F/T Sensor : ATi Mini58-SI-2800-120 x 2 IMU : MicroStrain 3DM-GX4-25 x 1 |
| Actuator | DYNAMIXEL PRO H-Series |
| DOF | Head : 2DOF ARM : 7DOF x 2 Waist : 1DOF Under body : 6DOF x 2 (gripper x 2) |
| Battery | LIPO 22.2V 22,000mA & 18.5V 11,000mA |
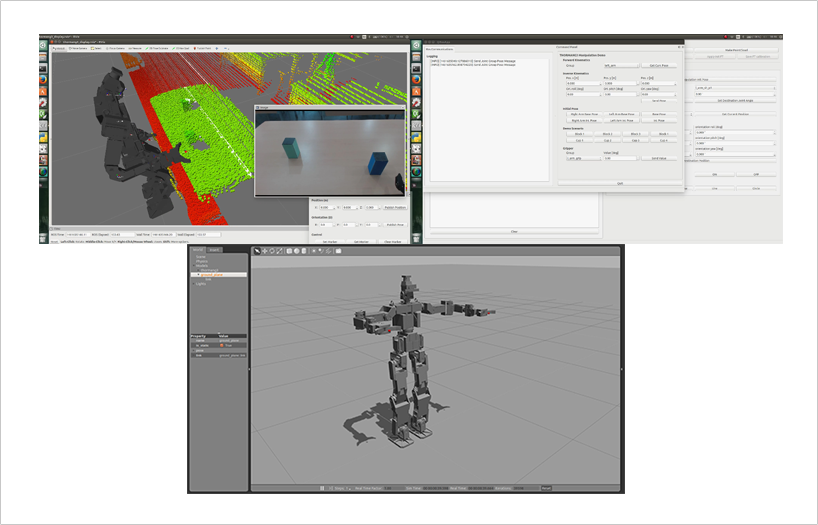
| Control Environment |
OS : Linux Ubuntu LTS (64bit) SW : ROS / GNU C++ (g++) Library : Motor Control, Manipulation, Head Control, Walking Engine, Sensor control |
Advantages of THORMANG
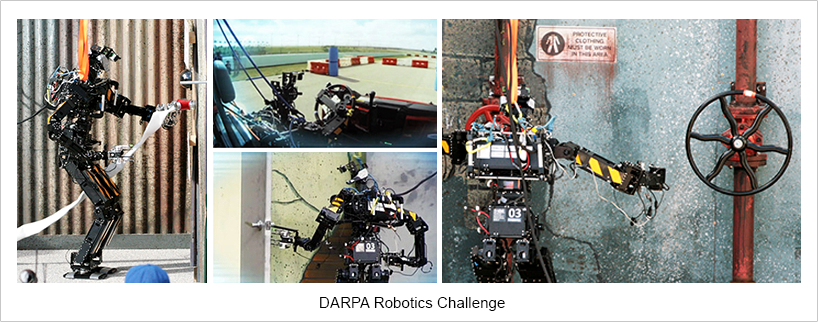
Usage of THORMANG

Request for Quote




 商品紹介
商品紹介