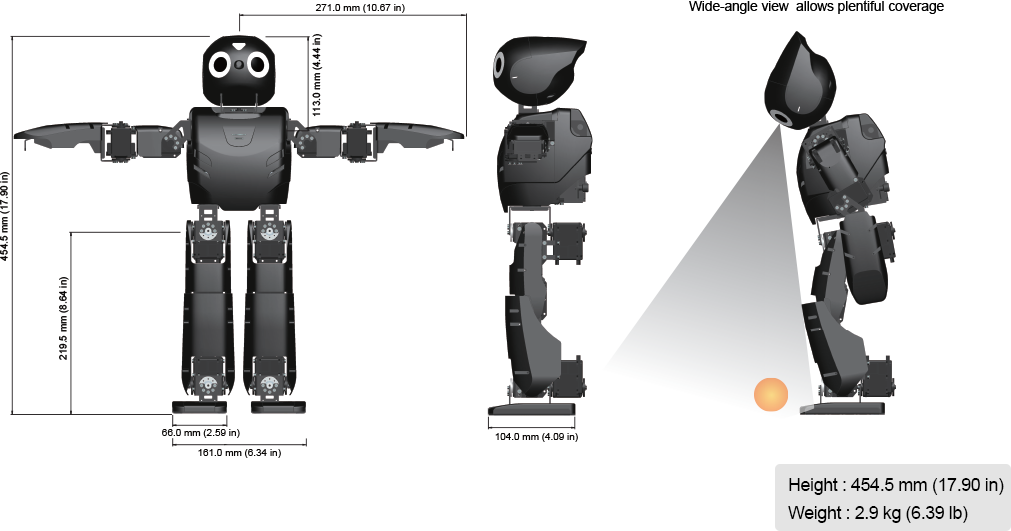
DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence-Open Platform) is an affordable,
miniature-humanoid-robot platform with advanced computational power, sophisticated sensors,
high payload capacity, and dynamic motion ability to enable many exciting research and education activities

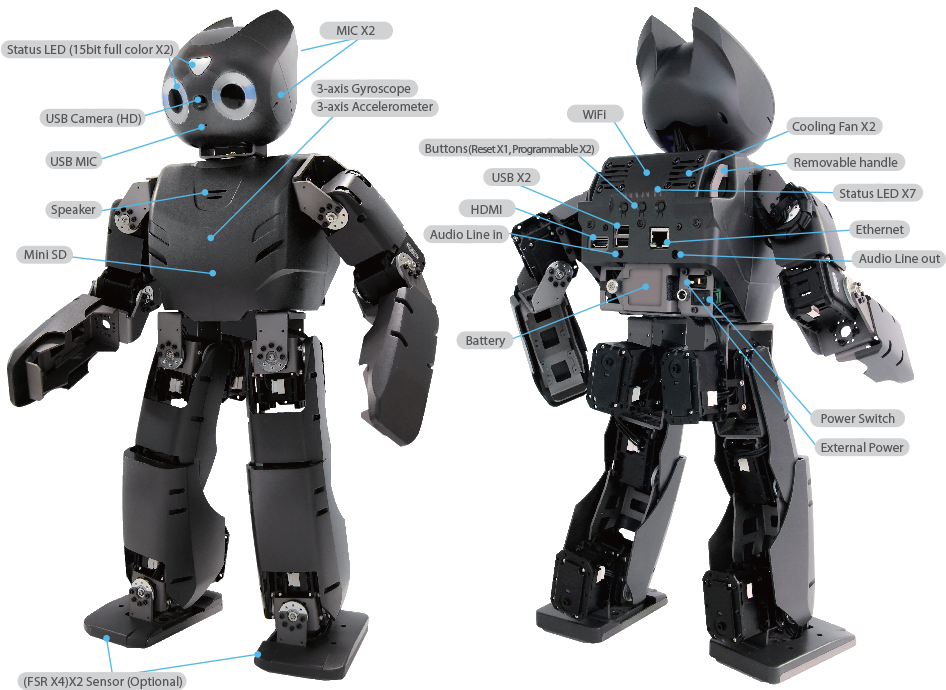
Standard PC-based Robot with Convenient Interfaces
High Performance and Advanced Features
- ▪ Default walking speed: 24.0 cm/sec (9.44 in/sec) 0.25 sec/step - user modifiable gait
- ▪ Default standing up time from ground: 2.8 sec (from facing down) and 3.9 sec (from facing up) - user modifiable speed
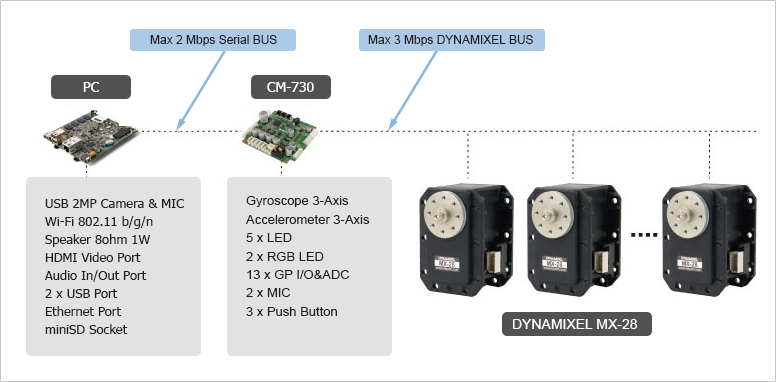
- ▪ Built-in PC: 1.6 GHz Intel Atom Z530 on-board 4GB flash SSD
- ▪ Management controller (CM-730): ARM CortexM3 STM32F103RE 72MHz
- ▪ 20 actuator modules (6 DOF leg x2+ 3 DOF arm x2 + 2 DOF neck)
- ▪ Actuators with durable metallic gears (DYNAMIXEL MX-28)
- ▪ Self-maintenance kit (easy to follow steps and instructions)
- ▪ Standby mode for low power consumption
- ▪ 3Mbps high-speed Dynamixel bus for joint control
- ▪ Battery (30 minutes of operations), charger, and external power adapter
(Battery can be removed from robot without shutting down by plugging in external power before removal)
- ▪ Versatile functionality (can accept legacy, current, and future peripherals)
- ▪ 3-axis gyro, 3-axis accelerometer, button x3, detection microphone x2
- >> For up-to-date information, check e-Manual (http://emanual.robotis.com/)
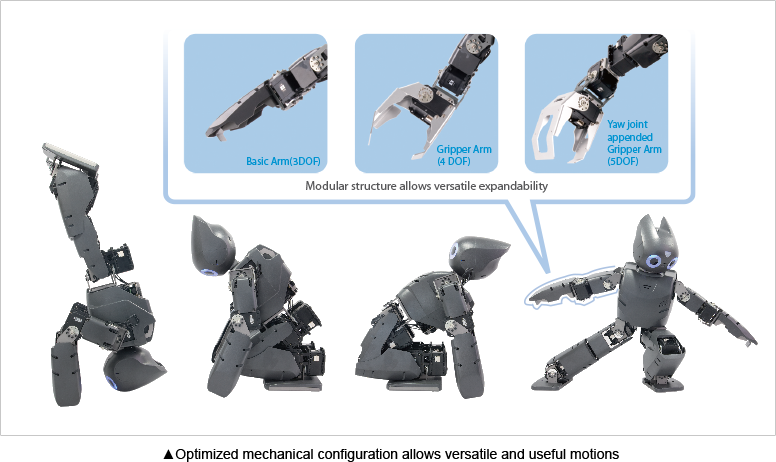
Efficient and Versatile Modular Configuration
Simple and Clean Architecture
Open Platform (Hardware and Software)
- ▪ Mechanics Information
- (Dimensions, Kinematics, Dynamics, CAD data)
- ▪ Electronics Information
- (Controllers, Sub B/Ds, Schematics, Part Information)
- ▪ Software Information
- (Development Environment, Framework, Source Code)
- ▪ Management Information
- (Detailed Assembly Diagrams, User Manintenance Guide)
- ▪ Community Resources
- (User-developed Code, Various Application Examples)
- http://sourceforge.net/projects/darwinop





 商品紹介
商品紹介