![]()
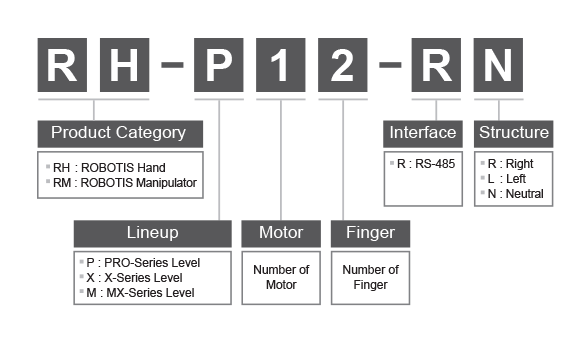
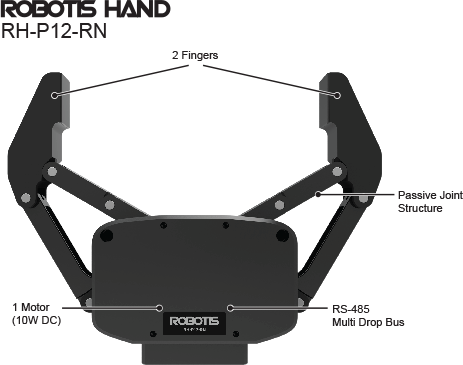
RH-P12-RN
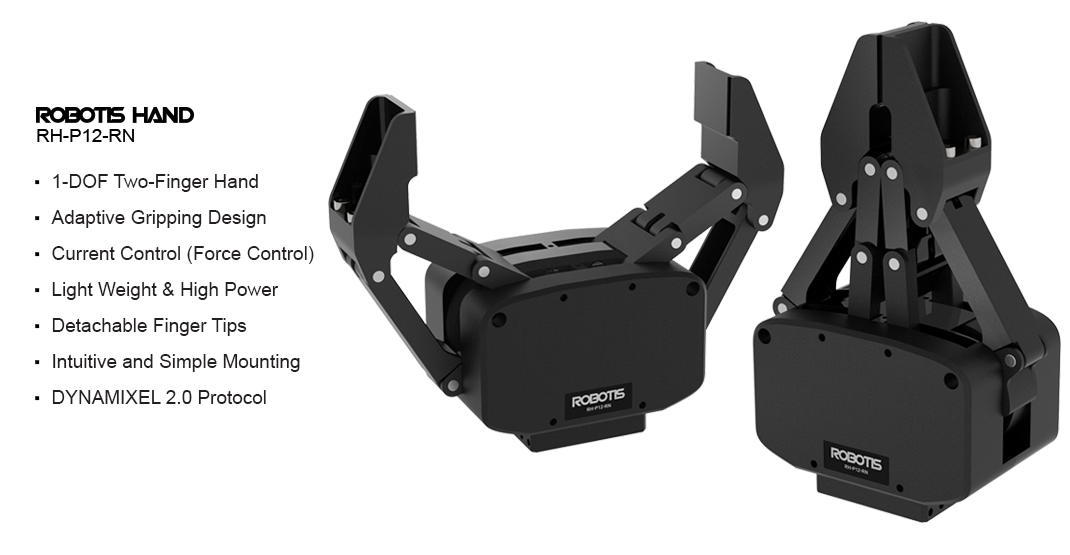
1-DOF Two-Finger Hand
Multi functional robot hand with 2 fingers powered by 10W DC motor.
Adaptive Gripping Design
Passive joints enable adaptive gripping for various shapes of objects.

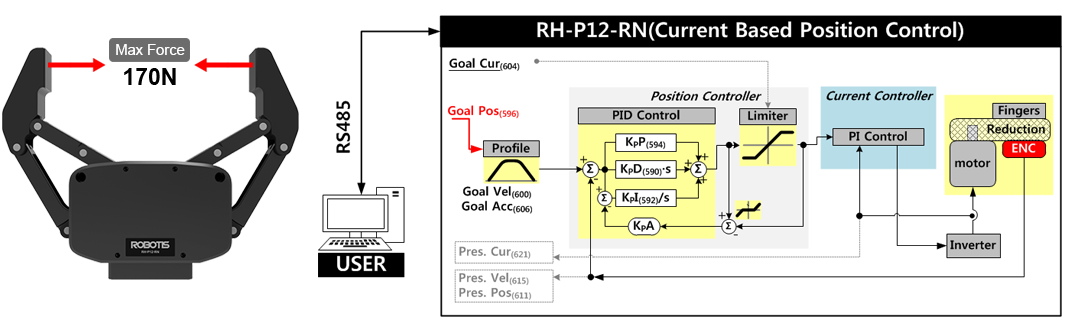
Current Control (Force Control)
Torque control and current-based position control make it possible to pick up objects of various materials.
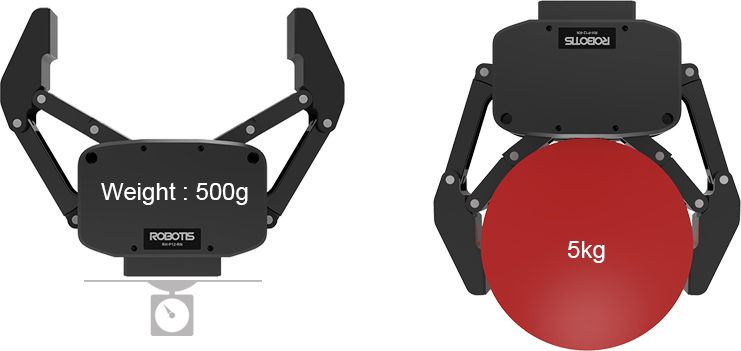
Light Weight & High Power
5kg of high payload is delivered from 500g light weighted robot hand.
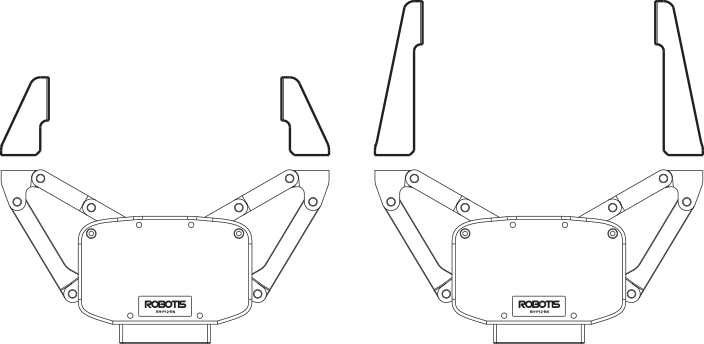
Detachable Finger Tips
Detachable finger tips can be easily replaced with customized finger tips.
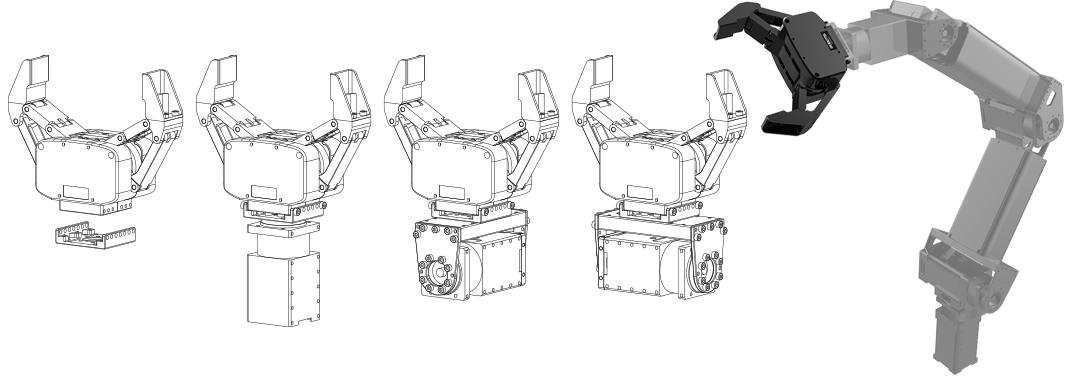
Intuitive and Simple Mounting
▪ The robot hand can be quickly mounted on ROBOTIS Manipulator.
▪ Simplified design enables easy mounting on custom applications.
DYNAMIXEL 2.0 Protocol
▪ The robot hand supports DYNAMIXEL 2.0 protocol for easy control.
▪ Power and communication are connected via DYNAMIXEL BUS.

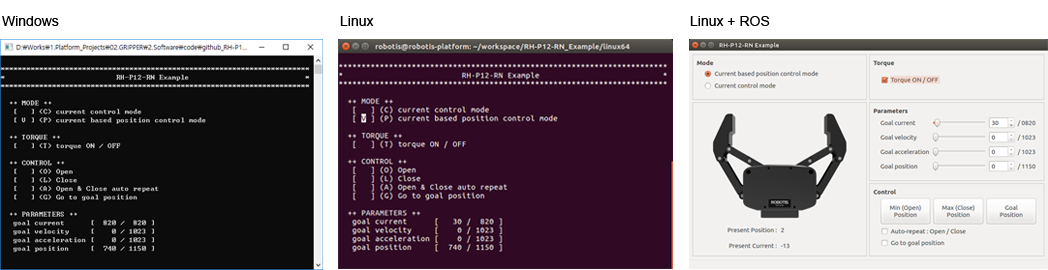
Supports Various Development Environments
C++ examples for Windows, Linux and ROS.
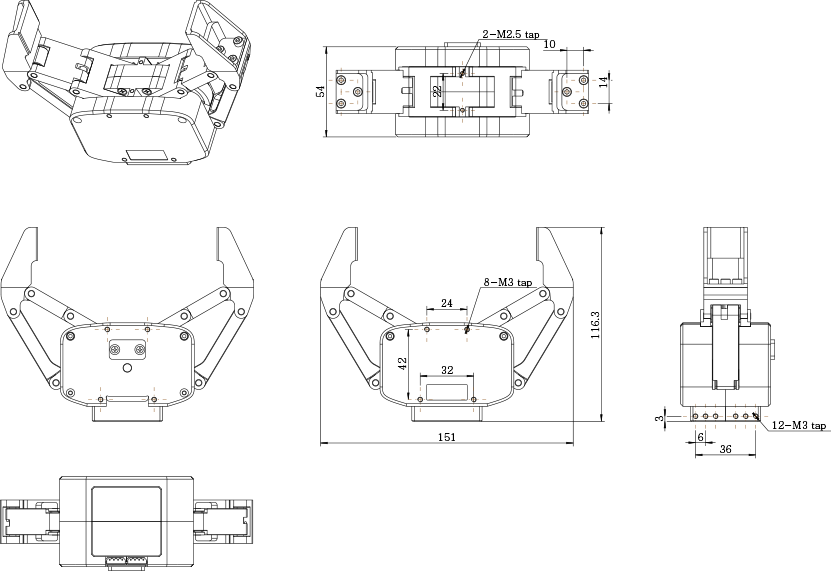
Mechanical Information
Specifications
| Properties | Data |
Weight |
500 g |
Recommended Payload |
5 kg |
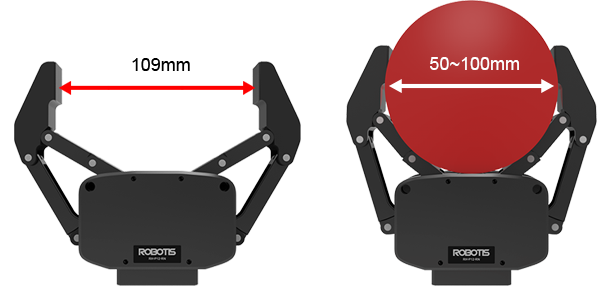
Maximum Stroke |
109 mm |
Diameter for Encompassing Grip |
50 ~ 100 mm |
Maximum Gripping Force |
170 N |
Protocol |
DYNAMIXEL 2.0 |
Nominal Voltage |
24V |
Network Interface |
RS-485 |
Product Name




 商品紹介
商品紹介