![]()
DYNAMIXEL X-Series is a new line-up
of high performance networked actuator module,
which has been widely used for building multi-joint robots
with reliability and expandability.
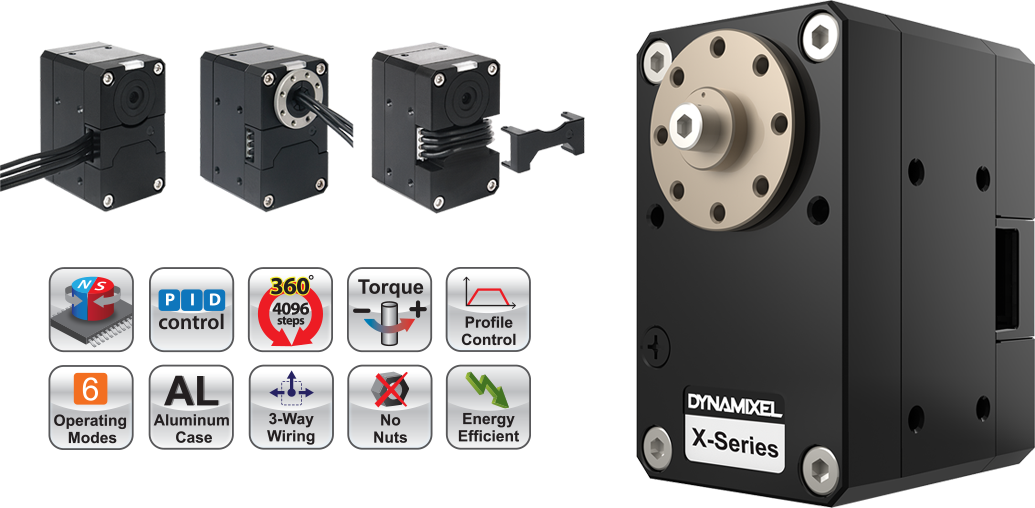
Basic Feature
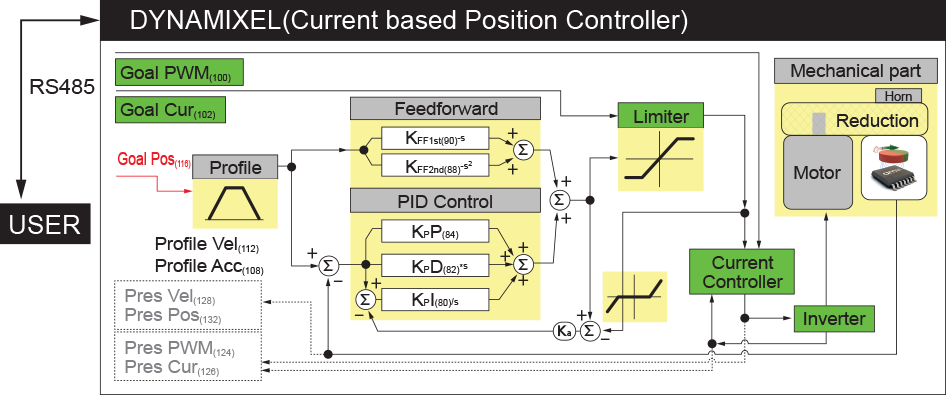
Various Control Functions

Sophisticated Control Architecture
New H/W Architecture
▪ Improved Torque, Compact Size
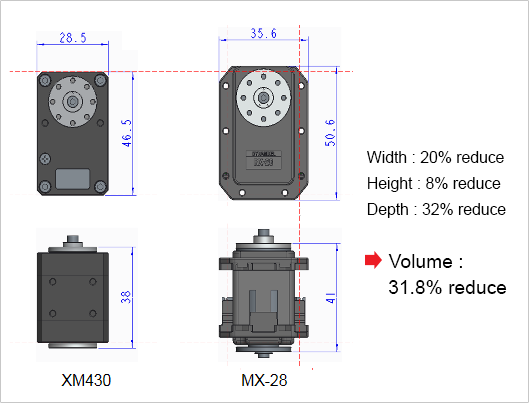
▪ Compact Design
▪ Direct Screw Assembly to the Case (without Nut Insert)
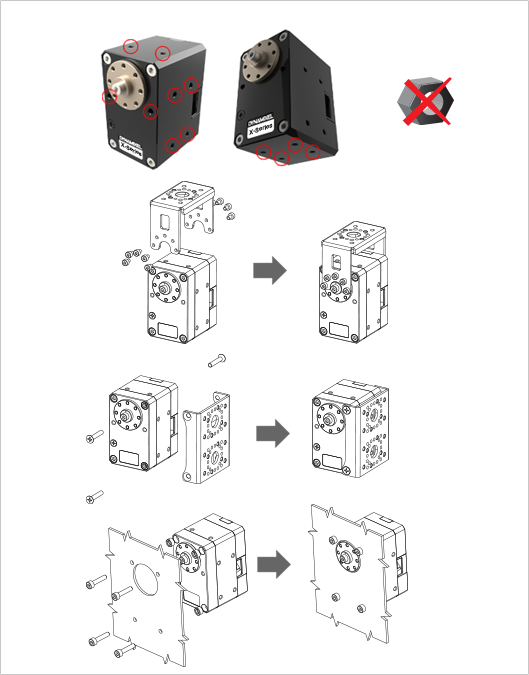
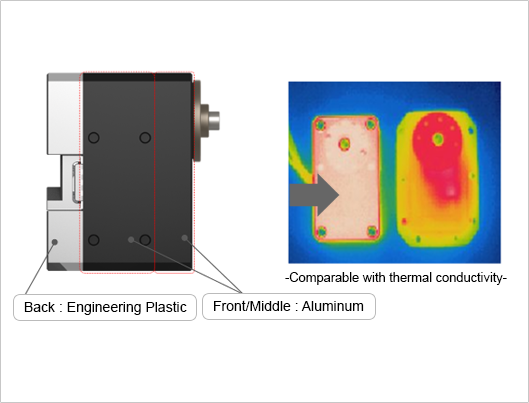
▪ Aluminum Case: Improved Heat Sink Featuring & Enhanced Durability
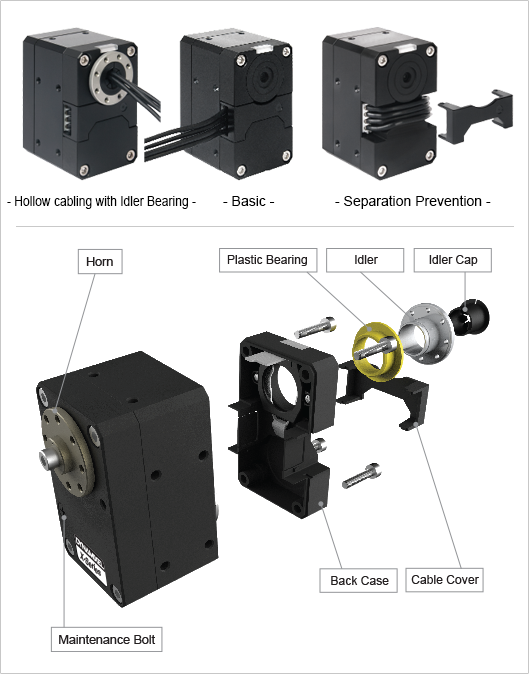
▪ Hollow Back Case Minimizes Cable Stress
▪ Cable cover can Prevention Cable Seperation
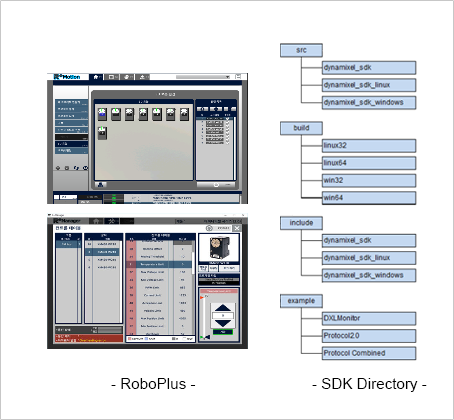
Development Environment
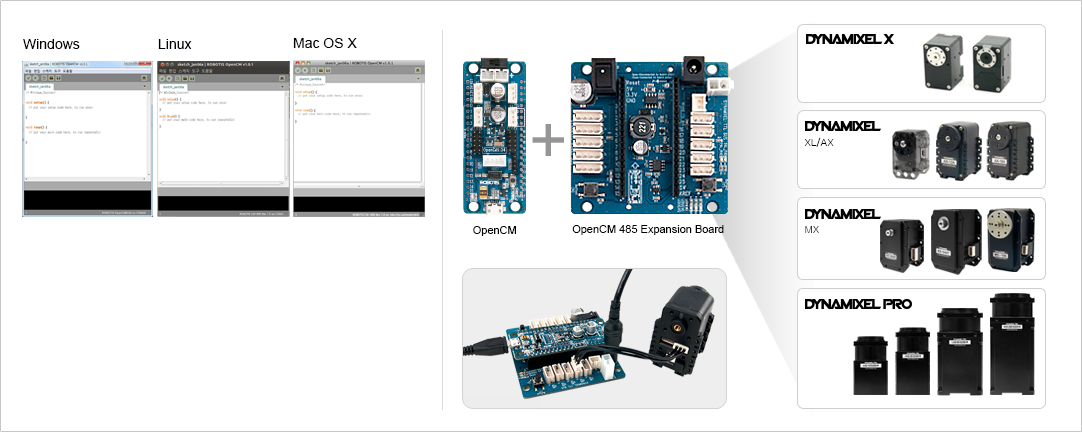
Compatible Device
▪ PC + USB2Dynamixel

▪ Embedded Board
- OpenCM Series
- 3rd Party Board




 商品紹介
商品紹介