![]()
The Actuator Solution for Full Scale Robots
High Power, High Precision
Full Modular Solution
Sophisticated Control Algorithms
Novel Gear Reduction System

Features

Purpose

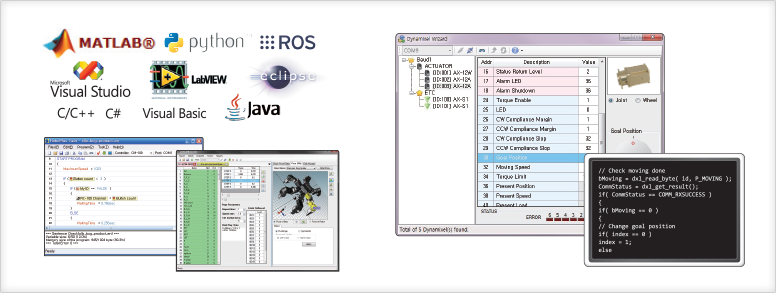
Control Environment
Provides various control environment just like DYNAMIXEL.
DYNAMIXEL SDK for Windows / Linux
Github : Click here
Moment of Inertia : Click here
Calibration Label
▪ Korea Testing Laboratory
▪ Korea Measuring Instrumentation Research Association




 商品紹介
商品紹介