![]()
All in one Actuator to build Multi-Jointed Robots
for DIY, Educational or Research

Basic Feature
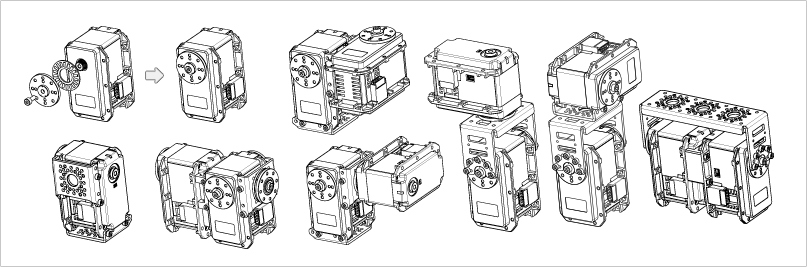
▪ All-in-One Modular Design
A module actuator which incorporates all the functions required for robot joints.

▪ All-around Assembling Structure
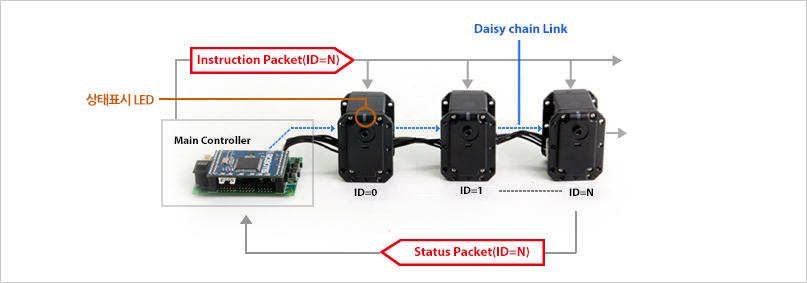
▪ Controlled via Network
Dynamixels have an unique ID that are controlled by packet communication on a bus. They support network of TTL, RS 485 etc. according to model
▪ Simple connection structure
Wiring is simple because it is linked by Daisy Chain
▪ Status Display functions
LED and Shut-down (Torque-off) functions can be set regarding high temperature, overload, overvoltage, and low voltage
▪ Compliance Setting
Compliance margin and slope control functions available.
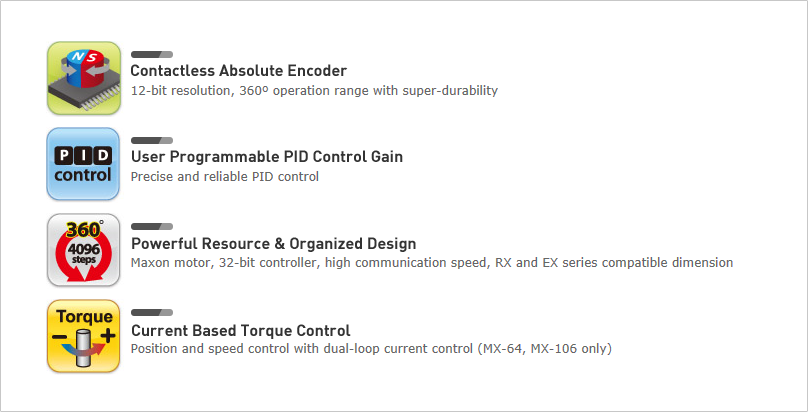
▪ PID Gain Control
Uses PID Gain Control, Proportional Gain, Integral Gain, Derivative Gain for control (MX series)
▪ Torque Setting
Torque can be set up by 1024 steps from maximum Torque to free run state.
▪ Low-electric current/high voltage drive
Its efficiency is high because it runs by high voltage, and it improves stability of robot system formed by Dynamixel because current consumption is low.
MX Series Characteristics
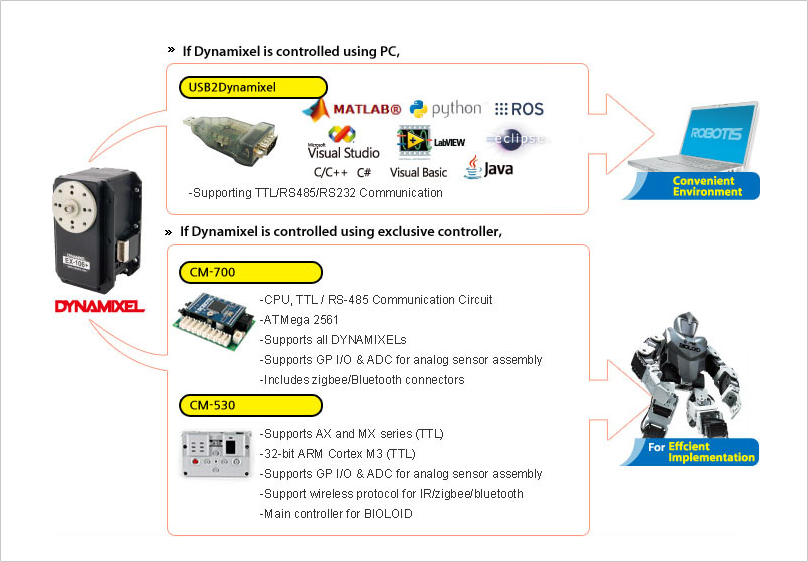
Controller
Dynamixel can be controlled using exclusive controllers and the PCs
Software
RoboPlus
The setting and the programming of Dynamixel can be done easily using RoboPlus.Embeded C
It makes the users possible to develop their own firmware.Dynamixel SDK
It is a standard programming library to develop S/W controls Dynamixel.Zigbee SDK
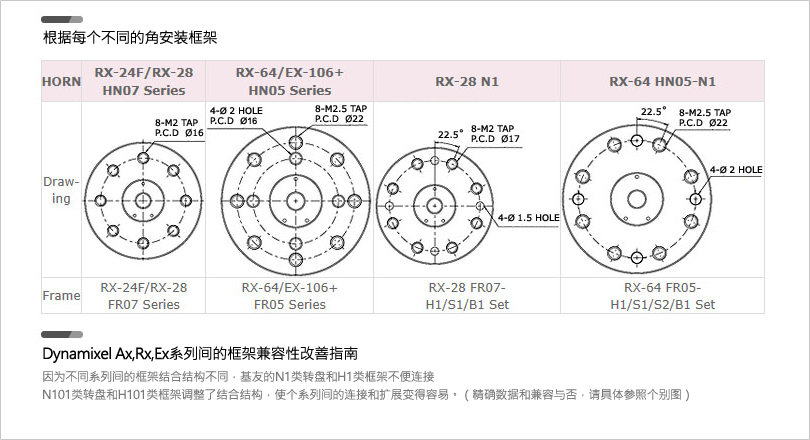
It is a standard programming library to develop S/W communicates with RoboPlus Task with RoboPlus Task code.Mountable frame according to each HORN




 商品紹介
商品紹介