![]()
AI研究はここから始まります
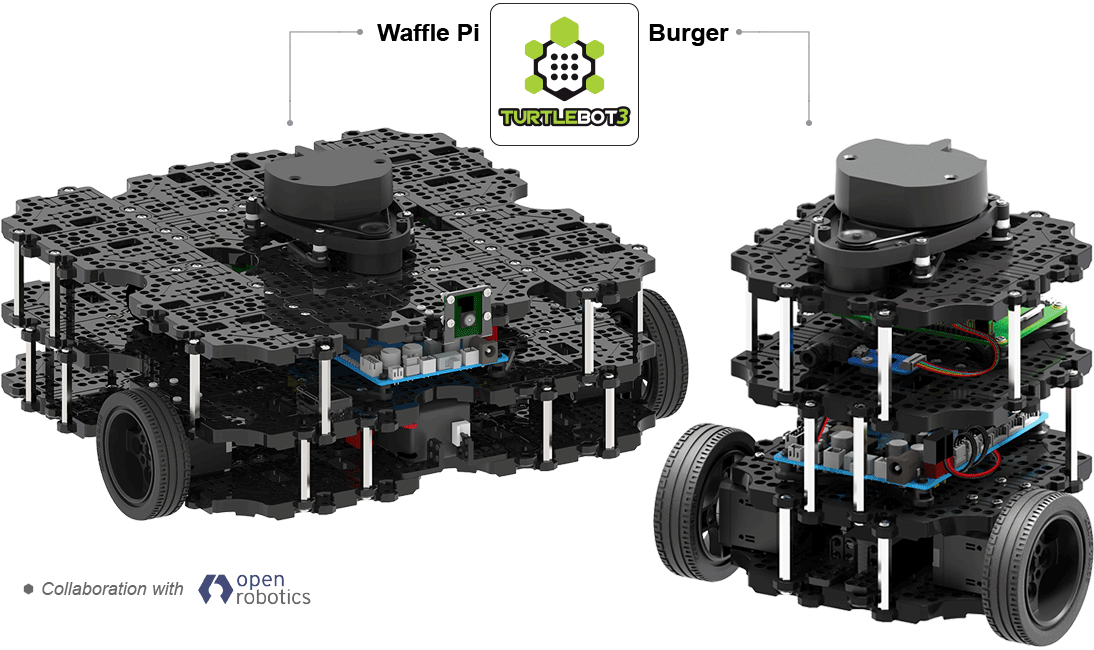
ROS公式プラットフォーム
TurtleBot3(タートルボット3)は、ROSの管理団体であるOpen RoboticsとロボットメーカーROBOTIS(ロボティズ)が共同開発したROS1,ROS2入門のためのLiDARを搭載したオープンソースの移動ロボットプラットフォームです。
無償公開のeマニュアル(Webドキュメント、チュートリアル)とサンプルプログラムによりROS1,ROS2の最新バージョンのインストールと学習・評価、応用開発が可能です。
特徴
 |
世界で最も人気のあるROSプラットフォーム TurtleBotは、教育と研究のための世界で最も人気のあるオープンソースロボットです。 |
 |
手ごろな価格 TurtleBotは、教育およびプロトタイプの研究開発のための最も手頃なプラットフォームです。 |
 |
小さいサイズ バックパックに入っているTurtleBotを想像して、どこにでも持っていきましょう。 |
 |
拡張性 さまざまなSBC、センサー、モーター、柔軟な構造で、想像を超えたアイデアを拡張します。 |
 |
モジュラーアクチュエータ 組み立て、保守、交換、再構成が簡単です。 |
 |
オープンソースソフトウェア ユーザー向けのさまざまなオープンソースソフトウェア。ダウンロードしたソースコードを変更して、友達と共有することができます。 |
 |
オープンソースハードウェア 回路図、PCBガーバー、BOM、および3DCADデータは完全にユーザーに公開されています。 |
 |
強力なセンサーラインナップ 使用率の高いRaspberryPiカメラ、拡張360°LiDAR、ロボット用の9軸慣性測定ユニットと精密エンコーダ。 |
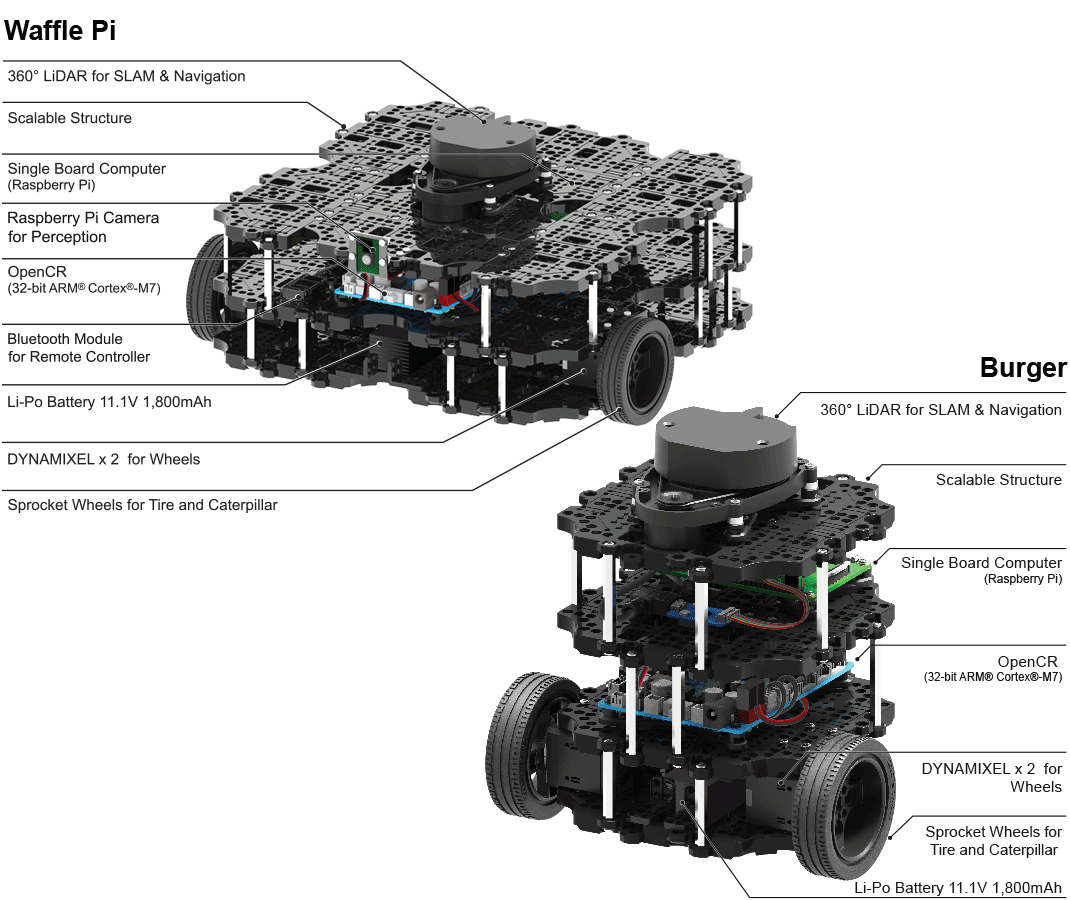
メインコンポーネント
仕様
Items |
Waffle Pi |
Burger |
| Maximum Translational Velocity | 0.26m/s | 0.22m/s |
| Maximum Rotational Velocity | 1.82rad/s (104.27 deg/s) | 2.84rad/s (162.72 deg/s) |
| Maximum Payload | 30kgs | 15kgs |
| Size (L x W x H) | 281mm × 306mm × 141mm | 138mm × 178mm × 192mm |
| Weight (+ SBC + Battery + Sensors) | 1.8kgs | 1kg |
| Operating Time | About 2hr | About 2hr 30m |
| Charging Time | About 2hr 30m | About 2hr 30m |
| DYNAMIXEL | XM430-W210-T | XL430-W250-T |
| SBC | Raspberry Pi(Support Jetson Nano) | Raspberry Pi(Support Jetson Nano) |
| Sensor | Raspberry Pi Camera 360°LiDAR 3-Axis gyroscope 3-Axis accelerometer |
360°LiDAR 3-Axis gyroscope 3-Axis accelerometer |
Raspberry Pi 3 or Raspberry Pi 4 |
Raspberry Pi Camera Module V2 |
360°LiDAR |
 |
 |
 |
| ▪ CPU : Quad Core 1.2GHz ▪ 1GB RAM ▪ Wireless LAN and BLE on board ▪ External Ports |
▪ Size : 25 × 24 × 9 mm ▪ Still Resolution : 8Megapixels ▪ Video modes : Max 1080p30 ▪ Sensor : Sony IMX219 |
▪ Detection distance : 120mm ~ 3,500mm ▪ Angular Range : 360° ▪ Angular Resolution : 1° |
* TurtleBot3 Hardware is compatible with Jetson Nano SBC.
eManual SBC Setup (Melodic) : https://emanual.robotis.com/docs/en/platform/turtlebot3/sbc_setup/#sbc-setup
関数
SLAM
ナビゲーション
自動運転
操作
ユースケース
R-BIZチャレンジ-TurtleBot3AutoRace
KAIST秋学期プロジェクト
TurtleBot3配信サービスのデモ
ガゼボでのシミュレーション
ROS DevelopmentStudioを使用
Homepage http://www.turtlebot.com
E-Manual http://emanual.robotis.com/
Github https://github.com/ROBOTIS-GIT/turtlebot3
Community https://discourse.ros.org