![]()
OpenManipulatorの紹介
ROSおよびArduino用の低コストマニピュレーター
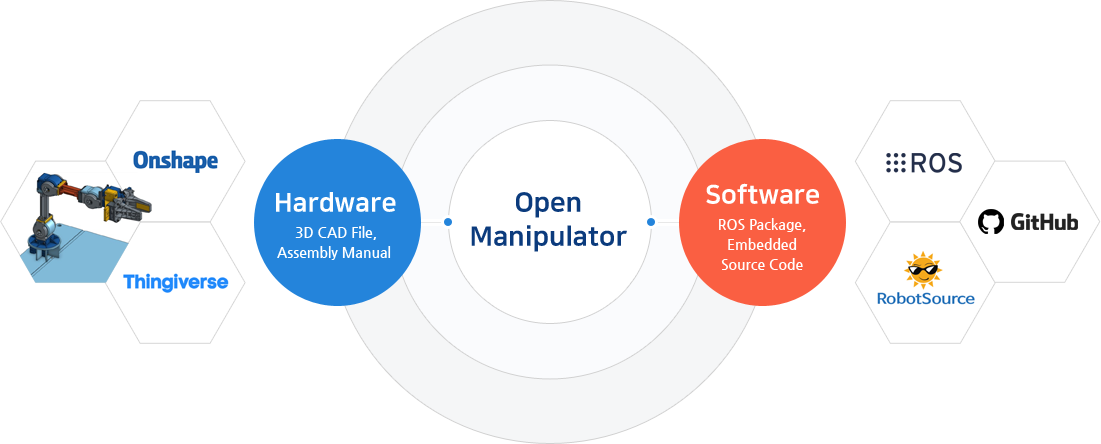
「OpenManipulator」とは何ですか?
開発用のオープンソースCAD、ソフトウェア、ハードウェア設計、および公開リソースを提供します。
ハイライト
- ▪ 低コスト、高い再現性、500gの最大ペイロード
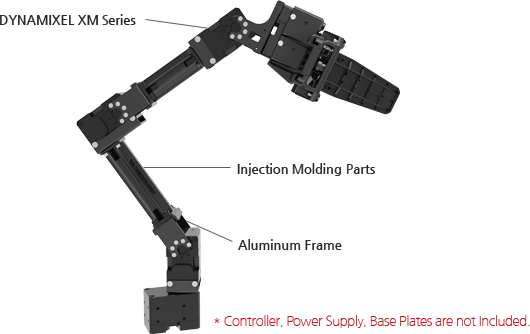
- ▪ フィードバック付きの精密サーボ制御(DYNAMIXEL Xシリーズ)
- ▪ モジュラー構造とオールインワンデザイン
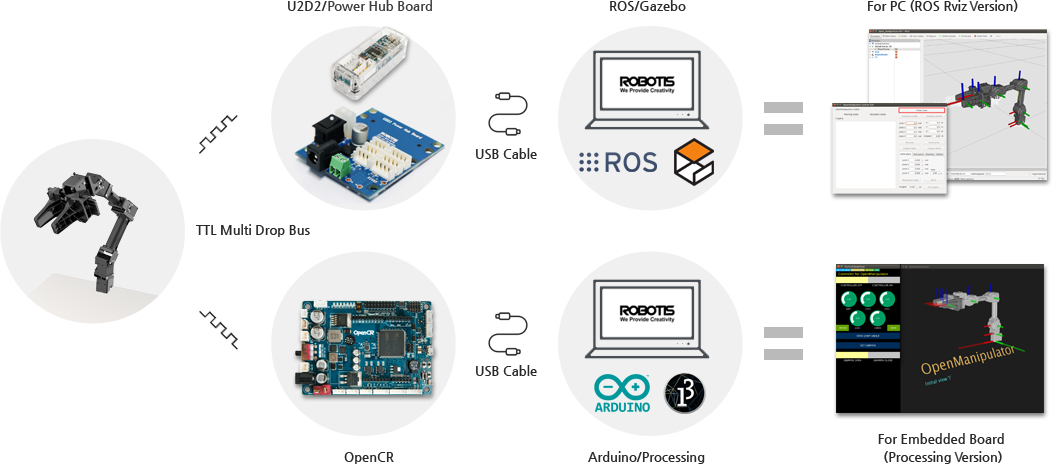
- ▪ PCまたは組み込みボードで使いやすい
- ▪ オープンソースハードウェア(CAD)およびソフトウェア(SDK)
- ▪ 軽量で移動ロボットプラットフォームとの統合が可能
仕様
Model Name |
RM-X52 | |
Actuator |
- | XM430-W350-T |
Input Voltage |
V | 12 |
DOF |
- | 5 (4 DOF + 1 DOF Gripper) |
Payload |
g | 500 |
Speed(Joint) |
RPM | 46 |
Weight |
kg (lb) | 0.70 (1.54) |
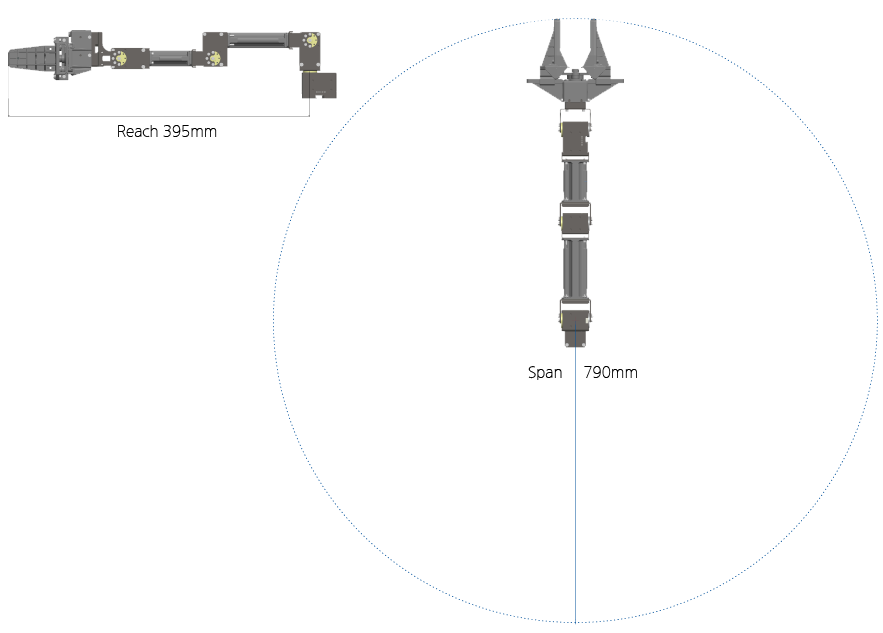
Reach |
mm (in) | 380 (14.9) |
Gripper Stroke |
mm (in) | 20~75 (0.79~2.95) |
| Communication | - | TTL (Level Multidrop BUS) |
| Software | - | ROS, DYNAMIXEL SDK, Arduino, Processing |
OpenManipulator |
Industrial |
Competitor |
||
| Programming Environment | ROS(gazebo, Movelt!) | ○ | △ |
Χ |
| Arduino IDE | ○ | Χ | △ | |
| Motor Control | Position Control | ○ | ○ | ○ |
| Current Control | ○ | △ | Χ | |
| Hardware Customizing | Interchangeable End-Effector | ○ | ○ | ○ |
| Expandable DOF | ○ | Χ | Χ | |
| Compatible with Mobile platform | ○ | △ | △ | |
| Software Customizing | Kinematics | ○ | Χ | Χ |
| Motor Controller | ○ | Χ | Χ | |
| Trajectory | ○ | △ | Χ | |
| Application | Pick and place | ○ | ○ | ○ |
| Teleoperation | ○ | ○ | ○ | |
| Camera Application | ○ | ○ | ○ |
ワークスペース
開発環境
MathWorks MATLABSDKが利用可能です
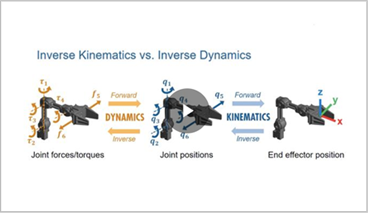
ロボットマニピュレータアルゴリズムの設計

ロボットマニピュレータの関節の制御
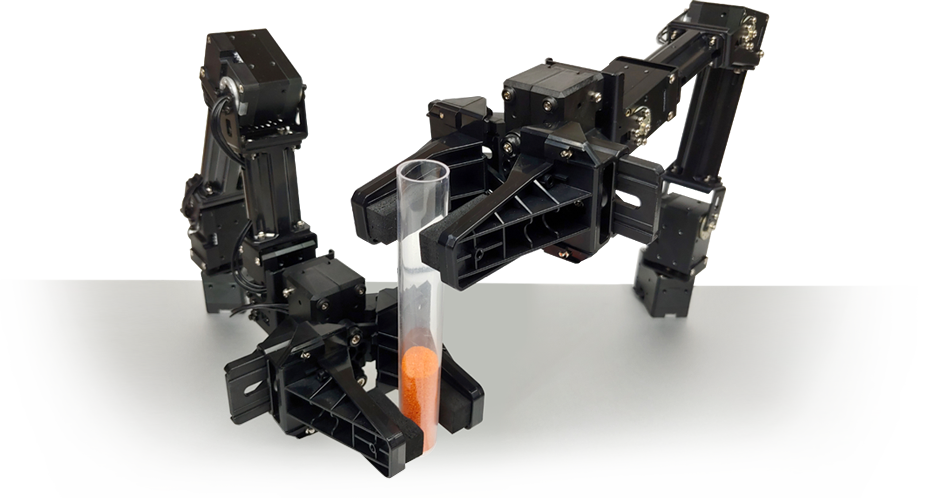
可能な代替構成
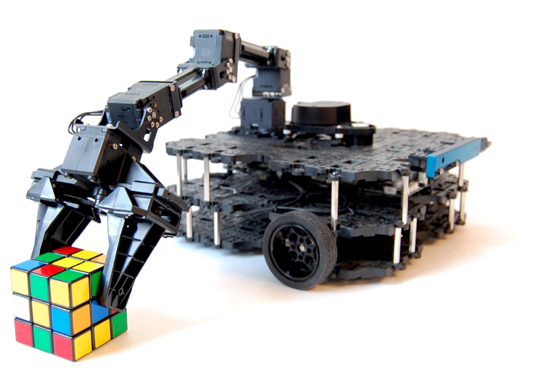
デスクトップマニピュレーター
モバイルマニピュレータ

カメラアプリケーション
さまざまなエンドエフェクタツール
IEEE SPECTRUMが推奨

OpenManipulatorは、誰にとっても用途の広いプラットフォームです
モーションプランニング、把握、
キネマティクス、およびモバイル操作
#Link 1 : Robot Gift Guide 2018
#Link 2 : AMBIDEX Cable-Driven Robot Arm, and More