![]()
研究と教育のための多目的で手頃なマニピュレータ
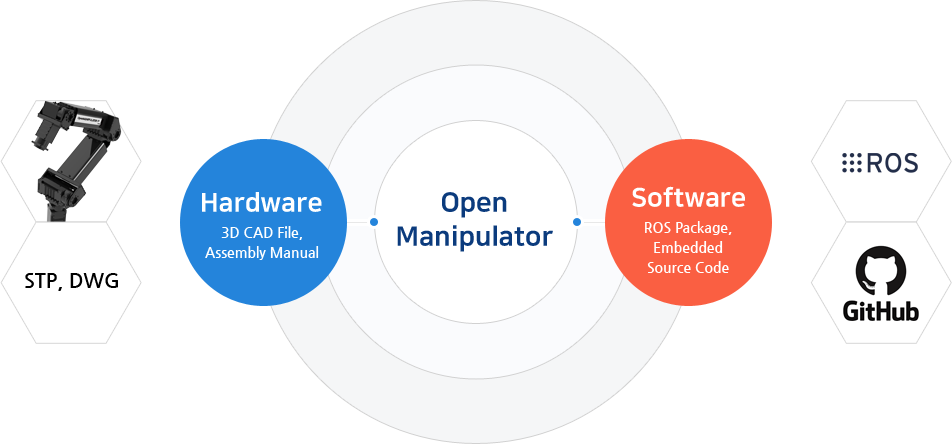
「OpenMANIPULATOR-P」とは?
ROBOTISは、ロボットマニピュレーターアームの開発のためのオープンソースCAD、ソフトウェア、ハードウェア設計、および公開リソースを提供します。
ハイライト
- ▪ ユーザーがプログラム可能なオープンソースマニピュレーターシステム
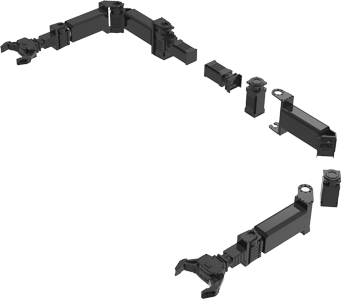
- ▪ メンテナンスとカスタマイズが容易なモジュラープラットフォーム
- ▪ 外部コントロールボックスがなく、重量とペイロードの比率が高い

仕様
Product Name |
OpenMANIPULATOR-P |
Model Name |
RM-P60-RNH |
DYNAMIXEL-P |
PH54-200-S500-R x2 PH54-100-S500-R x2 PH42-020-S300-R x2 |
DOF |
6 |
Payload (kg) |
3 |
Repeatability (mm) |
±0.05 |
Speed (Each joint, deg/sec) |
180 |
Weight (kg) |
5.5 |
Reach (mm) |
645 |
| Rated Voltage (VDC) | 24 |
| Communication | RS-485 (Multi Drop Bus) |
| Software | ROS (Ubuntu Linux) |
| Controller | PC (Not Included) |
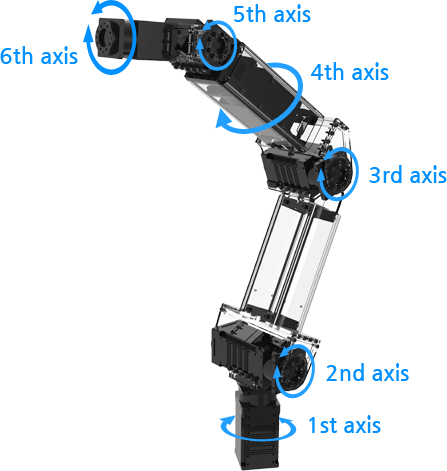
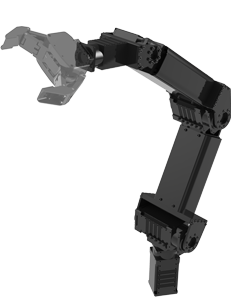
アクチュエータの配置と機械的構造
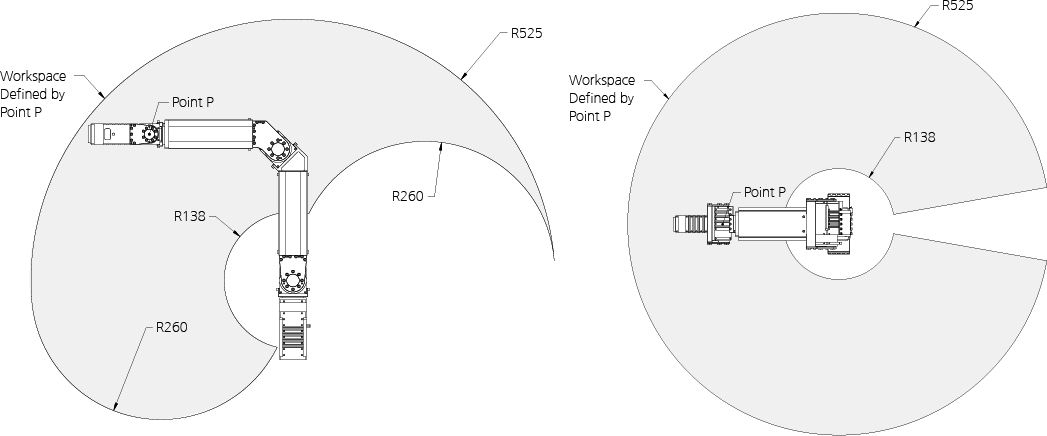
寸法
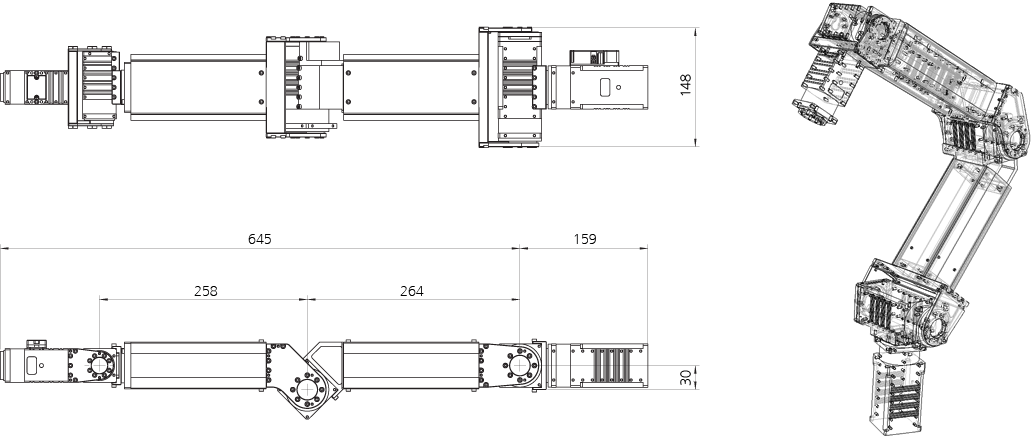
ワークスペースのリーチとフットプリント
使用例
ROBOTISロボットハンド(RH-P12-RN)でピックアンドプレース
デュアルマニピュレーションシステム
開発環境

● e-マニュアル (http://emanual.robotis.com/docs/en/platform/openmanipulator_pro/overview/)
- - 概要
- - 仕様
- - はじめに
- - [ROS] セットアップ
- - [ROS] マニピュレーターマネージャー
- - [ROS] 操作
- - [ROS] シミュレーション