![]()
RH-P12-RN

1-DOF2本指ハンド
10WDCモーターを搭載した2本の指を備えた多機能ロボットハンド

アダプティブグリップデザイン
パッシブパッシブジョイントは、さまざまな形状のオブジェクトの適応グリップを可能にします。
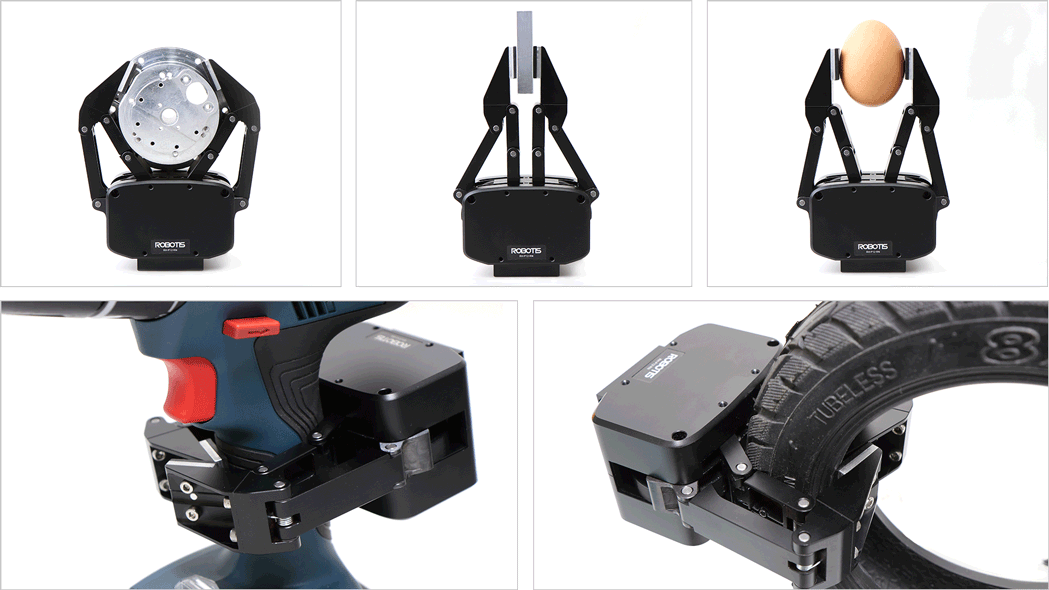
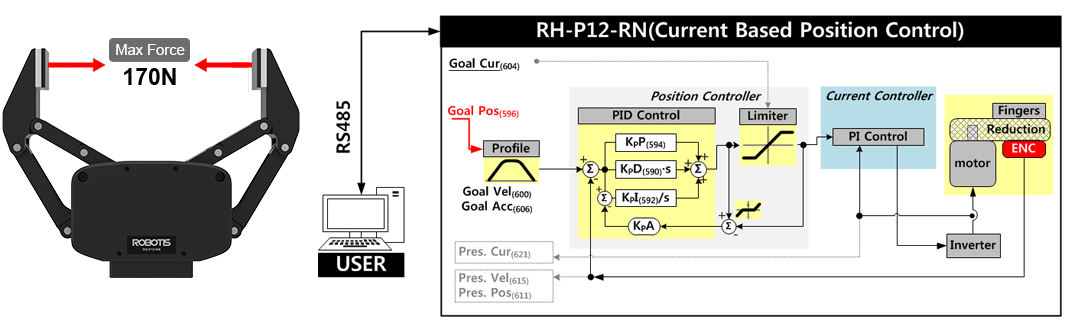
電流制御(力制御)
トルク制御と電流ベースの位置制御により、さまざまな材料の物体を拾うことができます。
軽量&ハイパワー
500gの軽量ロボットハンドから5kgの高ペイロードが供給されます。

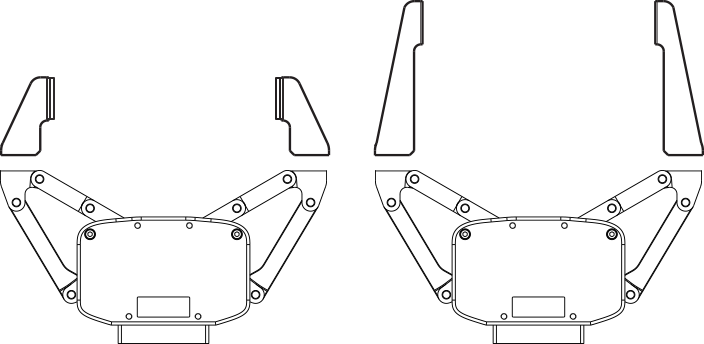
取り外し可能な指先
取り外し可能な指先は、カスタマイズされた指先と簡単に交換できます。
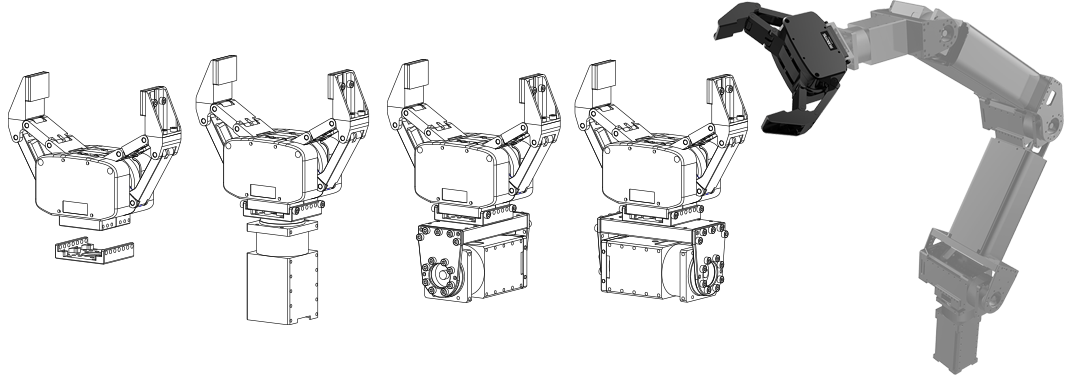
直感的でシンプルな取り付け
▪ 簡素化された設計により、カスタムアプリケーションに簡単に取り付けることができます。
▪ ロボットの手は、OpenMANIPULATOR-PおよびUniversal Robotse-Seriesにすばやく取り付けることができます。

DYNAMIXEL2.0プロトコル
▪ ロボットの手は、簡単に制御できるようにDYNAMIXEL2.0プロトコルをサポートしています。
▪ 電源と通信はDYNAMIXELBUSを介して接続されます。

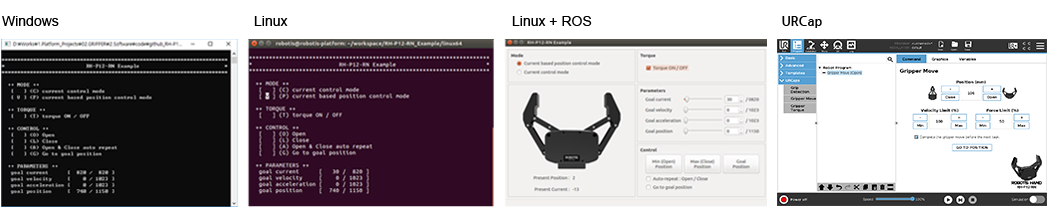
さまざまな開発環境をサポートします
▪ Windows、Linux、およびROSのC ++の例。
▪ ユニバーサルロボットURCapS / Wのサポート。
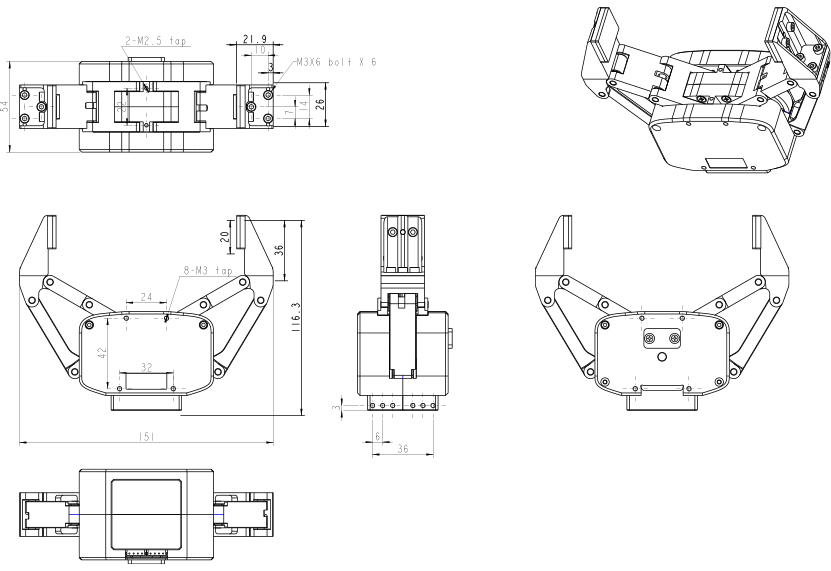
機械情報
仕様
| Properties | Data |
Weight |
500 g |
Recommended Payload |
5 kg |
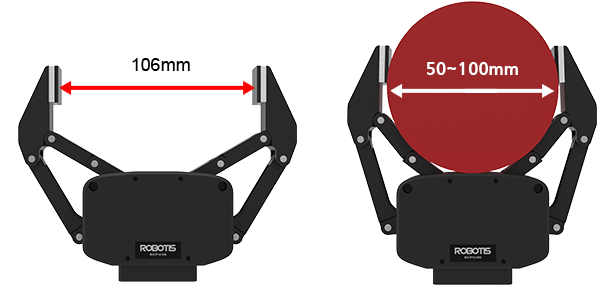
Maximum Stroke |
106 mm |
Diameter for Encompassing Grip |
50 ~ 100 mm |
Maximum Gripping Force |
170 N |
Protocol |
DYNAMIXEL 2.0 |
Nominal Voltage |
24V |
Network Interface |
RS-485 |
商品名

